微信小程序也在基础库 2.20.0 版本开始提供了开发 AR 功能的能力,即 VisionKit。VisionKit 包含了 AR 在内的视觉算法,要想开发微信小程序的 AR 功能,我们需要先了解 VisionKit。
VKSession
VisionKit 的核心就是 VKSession,即 VisionKit 会话对象。我们可以通过 wx.createVKSession 来创建 VKSession 的实例,此实例在页面上是单例,和页面的生命周期强相关,且页面间的 VKSeesion 实例运行周期互斥,这就确保了一个微信小程序在一个确定的时刻最多只会有一个 VKSession 实例,下面的 demo 以 v2 版本为例。
const session = wx.createVKSession({
track: {
plane: {mode: 3},
},
version: 'v2',
})
调 VKSession 实例的 start 方法可以启动 VKSession 实例:
session.start(err => {
if (err) return console.error('VK error: ', err)
// do something
})
接下来,我们要构建 3D 世界和渲染了。
渲染
AR 本意即为增强现实,通俗来讲就是可以在现实世界融入虚拟的东西,比如在现实世界的桌面上放一个虚拟的机器人。
那么要在微信小程序中看到这个效果,我们首先要能将现实画面画到屏幕上,这就依赖我们的摄像头了。当然,画面不是静止不动的,所以我们还得连续的将摄像头拍到的画面上屏,这就和我们使用 WebGL 绘制 3D 世界类似,逐帧渲染:
session.start(err => {
if (err) return console.error('VK error: ', err)
const onFrame = timestamp => {
const frame = session.getVKFrame(canvas.width, canvas.height)
if (frame) {
renderFrame(frame)
}
session.requestAnimationFrame(onFrame)
}
session.requestAnimationFrame(onFrame)
})
在大家熟知的 requestAnimationFrame 内,通过 VKSession 实例的 getVKFrame 方法可以获取到帧对象,帧对象中即包含了我们需要上屏的画面。此处我们在调 getVKFrame 时传入了画布的宽高,是因为我们此处就准备将其用 WebGL 渲染出来,之后我们就来看看 renderFrame 里是如何做的:
function renderFrame(frame) {
renderGL(frame)
// do something
}
function renderGL(frame) {
const { yTexture, uvTexture } = frame.getCameraTexture(gl, 'yuv')
const displayTransform = frame.getDisplayTransform()
// 上屏
}
通过 getCameraTexture 我们可以拿到 yuv 纹理,而此纹理是未经裁剪调整的纹理,所以还需要通过 getDisplayTransform 获取到纹理调整矩阵,然后在上屏时可以使用此矩阵对纹理进行裁剪调整。此处代码中的 gl 即是 WebGLRenderingContext 实例。
WebGL & three.js
那么上屏需要如何操作呢?这里需要我们拥有一定的 WebGL 知识,在此 demo 中我们自己编写着色器来将画面渲染到画布上,用 three.js 来渲染 3D 模型。
首先是初始化 three.js 部分:
import { createScopedThreejs } from 'threejs-miniprogram'
import { registerGLTFLoader } from './loaders/gltf-loader'
const THREE = createScopedThreejs(canvas)
registerGLTFLoader(THREE)
// 相机
const camera = new THREE.Camera()
// 场景
const scene = new THREE.Scene()
// 光源
const light1 = new THREE.HemisphereLight(0xffffff, 0x444444) // 半球光
light1.position.set(0, 0.2, 0)
scene.add(light1)
const light2 = new THREE.DirectionalLight(0xffffff) // 平行光
light2.position.set(0, 0.2, 0.1)
scene.add(light2)
// 渲染层
const renderer = new THREE.WebGLRenderer({antialias: true, alpha: true})
renderer.gammaOutput = true
renderer.gammaFactor = 2.2
// 机器人模型
const loader = new THREE.GLTFLoader()
let model
loader.load('https://dldir1.qq.com/weixin/miniprogram/RobotExpressive_aa2603d917384b68bb4a086f32dabe83.glb', gltf => {
model = {
scene: gltf.scene,
animations: gltf.animations,
}
})
const clock = new THREE.Clock()
此处使用 threejs-miniprogram 包,这是经过特殊封装以兼容微信小程序环境的 three.js 包,当然开发者们也可以替换成任意其它可以在微信小程序中跑的 WebGL 引擎,此处仅仅是以 three.js 来举例。registerGLTFLoader 则是用来加载 3D 模型。关于 three.js 的使用,这里只是给出了一个简单的 demo,有兴趣者可以查阅官方文档进行了解。
接下来是初始化 WebGL:
const gl = renderer.getContext()
// 编写着色器
const currentProgram = gl.getParameter(gl.CURRENT_PROGRAM)
const vs = `
attribute vec2 a_position;
attribute vec2 a_texCoord;
uniform mat3 displayTransform;
varying vec2 v_texCoord;
void main() {
vec3 p = displayTransform * vec3(a_position, 0);
gl_Position = vec4(p, 1);
v_texCoord = a_texCoord;
}
`
const fs = `
precision highp float;
uniform sampler2D y_texture;
uniform sampler2D uv_texture;
varying vec2 v_texCoord;
void main() {
vec4 y_color = texture2D(y_texture, v_texCoord);
vec4 uv_color = texture2D(uv_texture, v_texCoord);
float Y, U, V;
float R ,G, B;
Y = y_color.r;
U = uv_color.r - 0.5;
V = uv_color.a - 0.5;
R = Y + 1.402 * V;
G = Y - 0.344 * U - 0.714 * V;
B = Y + 1.772 * U;
gl_FragColor = vec4(R, G, B, 1.0);
}
`
const vertShader = gl.createShader(gl.VERTEX_SHADER)
gl.shaderSource(vertShader, vs)
gl.compileShader(vertShader)
const fragShader = gl.createShader(gl.FRAGMENT_SHADER)
gl.shaderSource(fragShader, fs)
gl.compileShader(fragShader)
const program = gl.createProgram()
gl.attachShader(program, vertShader)
gl.attachShader(program, fragShader)
gl.deleteShader(vertShader)
gl.deleteShader(fragShader)
gl.linkProgram(program)
gl.useProgram(program)
const uniformYTexture = gl.getUniformLocation(program, 'y_texture')
gl.uniform1i(uniformYTexture, 5)
const uniformUVTexture = gl.getUniformLocation(program, 'uv_texture')
gl.uniform1i(uniformUVTexture, 6)
const dt = gl.getUniformLocation(program, 'displayTransform')
gl.useProgram(currentProgram)
// 初始化 VAO
const ext = gl.getExtension('OES_vertex_array_object')
const currentVAO = gl.getParameter(gl.VERTEX_ARRAY_BINDING)
const vao = ext.createVertexArrayOES()
ext.bindVertexArrayOES(vao)
const posAttr = gl.getAttribLocation(program, 'a_position')
const pos = gl.createBuffer()
gl.bindBuffer(gl.ARRAY_BUFFER, pos)
gl.bufferData(gl.ARRAY_BUFFER, new Float32Array([1, 1, -1, 1, 1, -1, -1, -1]), gl.STATIC_DRAW)
gl.vertexAttribPointer(posAttr, 2, gl.FLOAT, false, 0, 0)
gl.enableVertexAttribArray(posAttr)
vao.posBuffer = pos
const texcoordAttr = gl.getAttribLocation(program, 'a_texCoord')
const texcoord = gl.createBuffer()
gl.bindBuffer(gl.ARRAY_BUFFER, texcoord)
gl.bufferData(gl.ARRAY_BUFFER, new Float32Array([1, 1, 0, 1, 1, 0, 0, 0]), gl.STATIC_DRAW)
gl.vertexAttribPointer(texcoordAttr, 2, gl.FLOAT, false, 0, 0)
gl.enableVertexAttribArray(texcoordAttr)
vao.texcoordBuffer = texcoord
ext.bindVertexArrayOES(currentVAO)
这一块属于 WebGL 的知识,这里就不再做过多赘述,有兴趣者可以借助搜索引擎查阅相关资料了解。之后我们就可以完善前面的 renderGL 方法,完成上屏代码的编写:
function renderGL(frame) {
const gl = renderer.getContext()
gl.disable(gl.DEPTH_TEST)
// 获取纹理和调整矩阵
const {yTexture, uvTexture} = frame.getCameraTexture(gl, 'yuv')
const displayTransform = frame.getDisplayTransform()
if (yTexture && uvTexture) {
const currentProgram = gl.getParameter(gl.CURRENT_PROGRAM)
const currentActiveTexture = gl.getParameter(gl.ACTIVE_TEXTURE)
const currentVAO = gl.getParameter(gl.VERTEX_ARRAY_BINDING)
gl.useProgram(program)
ext.bindVertexArrayOES(vao)
// 传入调整矩阵
gl.uniformMatrix3fv(dt, false, displayTransform)
gl.pixelStorei(gl.UNPACK_ALIGNMENT, 1)
// 传入 y 通道纹理
gl.activeTexture(gl.TEXTURE0 + 5)
const bindingTexture5 = gl.getParameter(gl.TEXTURE_BINDING_2D)
gl.bindTexture(gl.TEXTURE_2D, yTexture)
// 传入 uv 通道纹理
gl.activeTexture(gl.TEXTURE0 + 6)
const bindingTexture6 = gl.getParameter(gl.TEXTURE_BINDING_2D)
gl.bindTexture(gl.TEXTURE_2D, uvTexture)
gl.drawArrays(gl.TRIANGLE_STRIP, 0, 4)
gl.bindTexture(gl.TEXTURE_2D, bindingTexture6)
gl.activeTexture(gl.TEXTURE0 + 5)
gl.bindTexture(gl.TEXTURE_2D, bindingTexture5)
gl.useProgram(currentProgram)
gl.activeTexture(currentActiveTexture)
ext.bindVertexArrayOES(currentVAO)
}
}
至此,基础背景画面就画到屏幕上了,在手机上看到的效果就如同开着摄像头一样。
放置 3D 模型
诚然,仅效果来看,到此为止还不能将其称其为 AR,接下来我们要实现这么一个功能:点击屏幕,然后在画面上对应的 3D 世界位置放置一个机器人模型;比如点击画面中的桌子,就在桌子上放一个机器人模型。
前面我们引入的 three.js 就是为了做这个效果,现在流行的 WebGL 引擎基本上都封装了大量方便我们快速使用的接口,比如光照渲染、模型加载等,前面的代码已经做过演示,这里就不再重复说明。
这里我们需要了解的是 VKSession 的 hitTest 接口。这个接口的主要是为了将 2D 坐标转成 3D 世界坐标,即 (x, y) 转成 (x, y, z)。通俗来说就是画面上显示的桌子,在屏幕上它是 2D 的,当我们手指触摸屏幕时拿到的坐标是 2D 坐标,也就是 (x, y);hitTest 接口可以将其转换成 3D 世界坐标 (x, y, z),而 3D 世界坐标系的原点则是相机打开瞬间其所在的点:
function onTouchEnd(evt) {
const touches = evt.changedTouches.length ? evt.changedTouches : evt.touches
// 在点击位置放一个机器人模型
if (touches.length === 1) {
const touch = touches[0]
if (session && scene && model) {
// 调用 hitTest
const hitTestRes = session.hitTest(touch.x / width, touch.y / height)
if (hitTestRes.length) {
model.scene.scale.set(0.05, 0.05, 0.05)
// 动画混合器
const mixer = new THREE.AnimationMixer(scene)
for (let i = 0; i < model.animations.length; i++) {
const clip = model.animations[i]
if (clip.name === 'Dance') {
const action = mixer.clipAction(clip)
action.play()
}
}
// 把模型放到对应的位置上
const cnt = new THREE.Object3D()
cnt.add(model.scene)
model.matrixAutoUpdate = false
model.matrix.fromArray(hitTestRes[0].transform)
scene.add(model)
}
}
}
}
可以看到 hitTest 传入的两个参数并不是标准的坐标值,而是将其除以画布宽高后得到的值再传入。这里接受的参数其实是相对于画布视窗的坐标,取值范围为 [0, 1],0 为左/上边缘,1 为右/下边缘。而 hitTest 返回的结果则是矩阵,里面包含了 3D 世界坐标的位置、旋转和放缩信息。可以看到这矩阵可以直接为 three.js 所用,这也是此次 demo 选用 three.js 的原因之一,它封装了很多繁杂的实现细节,简化了大量代码。
之后就是调 three.js 相关的渲染接口,把机器人模型也画到画面上,这里我们可以继续完善前面的 renderFrame 方法:
function renderFrame(frame) {
renderGL(frame)
const frameCamera = frame.camera
// 更新动画
const dt = clock.getDelta()
mixer.update(dt)
// 相机
if (camera) {
camera.matrixAutoUpdate = false
camera.matrixWorldInverse.fromArray(frameCamera.viewMatrix)
camera.matrixWorld.getInverse(camera.matrixWorldInverse)
const projectionMatrix = frameCamera.getProjectionMatrix(NEAR, FAR)
camera.projectionMatrix.fromArray(projectionMatrix)
camera.projectionMatrixInverse.getInverse(camera.projectionMatrix)
}
renderer.autoClearColor = false
renderer.render(scene, camera)
renderer.state.setCullFace(THREE.CullFaceNone)
}
这里通过帧对象的 camera 属性拿到了帧相机,然后通过帧相机的 viewMatrix 拿到了视图矩阵,通过 getProjectionMatrix 方法拿到了投影矩阵,统统传给 three.js 的相机对象,以确保 three.js 的相机位置、角度正确,同时确保 3D 世界渲染出来的效果符合我们人眼所看到的景象。
至此,前面那个点屏幕点击位置对应的 3D 世界放置一个机器人模型的效果得以完成。
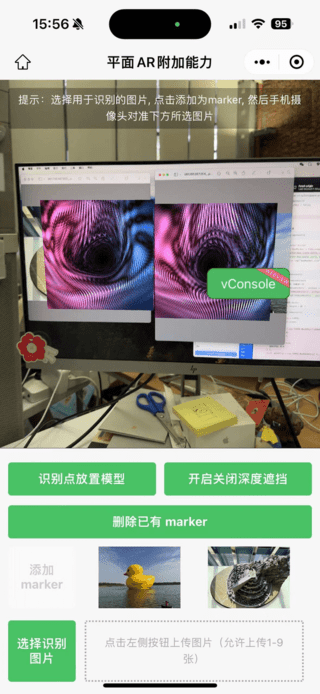
平面检测
在对如何在微信小程序中实现一个 AR 功能有所了解后,我们可能需要扩展一些场景:比如需要检测出 3D 世界的平面。
VisionKit 识别到的平面会以 anchor 对象的方式提供给我们,这里 VKSession 提供了很便利的事件:addAnchors/updateAnchors/removeAnchors,通过这三个事件我们可以监听 anchor 列表的变化:
session.on('addAnchors', anchors => {
// anchor.id - anchor 唯一标识
// anchor.type - anchor 类型,0 表示是平面 anchor
// anchor.transform - 包含位置、旋转、放缩信息的矩阵,以列为主序
// anchor.size - 尺寸
// anchor.alignment - 方向
// do something
})
session.on('updateAnchors', anchors => {
// do something
})
session.on('removeAnchors', anchors => {
// do something
})
- 程序示例
可以在 VisionKit基础能力使用参考 页面查看示例代码。